課題
ナノ結晶を作成する実験では、0.3秒以内に正確なインジェクションが必要です。しかし、手作業ではタイミングに誤差が生じやすいため、正確な制御を実現することが困難でした。この精密なタイミング制御の不一致が、実験結果のばらつきや再現性の低下を引き起こしていました。
ソリューション
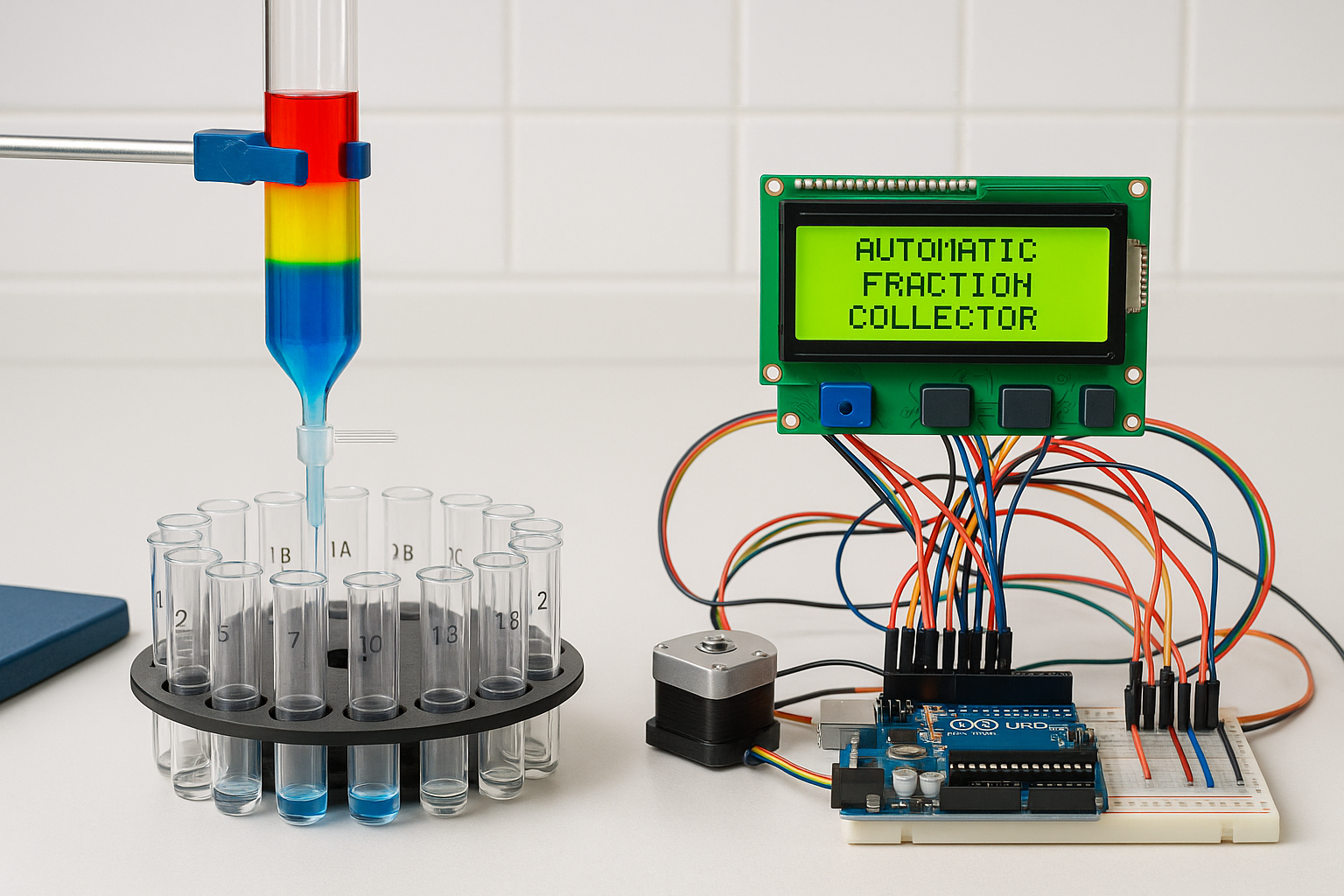
ロボットアームとサーボモーターを用いて自動化システムを開発しました。このシステムでは、(1)溶液を吸引、(2)ギアを特定位置から特定位置へ移動させることで0.3秒の正確なインジェクションを実現、(3)溶液排出後、次のインジェクションの準備を自動的に行う、という一連のプロセスを自動化。人の手では困難だった精密なタイミング制御を可能にしました。
導入効果
- インジェクションタイミングの精密制御実現
- ナノ結晶合成の再現性向上
- 実験精度の安定化
- 研究者の負担軽減
導入プロセス
1
要件分析
ナノ結晶合成プロセスの詳細分析とタイミング制御の要件特定
2
機構設計
0.3秒でのインジェクションを実現するギア機構とロボットアームの設計
3
制御システム開発
サーボモーターの精密な制御アルゴリズムの開発
4
プロトタイプ開発
基本機能を備えたシステムのプロトタイプ開発
5
導入・統合
研究環境への本格導入と既存システムとの統合
6
運用・最適化
システムの安定運用と継続的な最適化